Claude 自主操控机器狗,速度比人类快 37.7 倍:Anthropic Project Fetch 第二阶段
Anthropic 发布 Project Fetch 第二阶段研究:Claude Opus 4.7 在零人类协助下操控机器狗完成复杂任务,平均每项仅需 2.4 分钟,而去年的人类团队需要 72 分钟。
原文来源:Anthropic Research Blog — Anthropic 发布 Project Fetch 第二阶段研究成果:Claude Opus 4.7 在没有人类协助的情况下,以比人类团队快 37.7 倍的速度完成了机器人操控任务。
一、从"辅助人类"到"替代人类"的跨越
2025 年 8 月,Anthropic 的 Frontier Red Team 做了一个实验:他们让两组人类团队操控一台四足机器人("机器狗"),一组可以使用 Claude 辅助,另一组只能靠互联网和自己想办法。结果 Claude 辅助组大幅领先。
当时这个结果已经令人印象深刻——AI 能够显著加速人类完成物理世界任务的速度。
但 2026 年 6 月 18 日发布的第二阶段结果,彻底改写了剧本。
这次,Claude Opus 4.7 在没有人类协助的情况下,独立完成了所有任务——而且比去年最快的人类团队快了整整 37.7 倍。
"Claude Opus 4.7——在完全没有人类协助的情况下——在所有任务上比去年实验中最快的人类团队快大约 20 倍。"
Anthropic 用一句话总结了这项发现的意义:我们很可能正在进入物理 AI Agent 的早期时代。
—— 广告 ——
二、实验设计:人类只负责插电源
第二阶段的实验设置极其简单:
| 要素 | 说明 |
|---|---|
| 模型 | Claude Opus 4.7(adaptive thinking, effort=max),运行在 Claude Code 中 |
| 人类角色 | 插入笔记本电脑、输入初始提示词、审批命令、切换到下一任务 |
| 硬件 | 商用四足机器人("机器狗"),配备摄像头和激光雷达 |
| 实验次数 | 每项任务 3 轮试验 |
测试的任务是去年实验的子集,排除了需要物理手柄操控的部分:
- 连接机器狗的摄像头
- 连接机器狗的激光雷达传感器
- 编写并运行手动控制程序
- 开发监测机器狗运动轨迹的方法
- 编写检测沙滩球的程序
- (尝试性)自主取回沙滩球——这是唯一未成功的任务
三、核心数据:一个令人震惊的速度差距
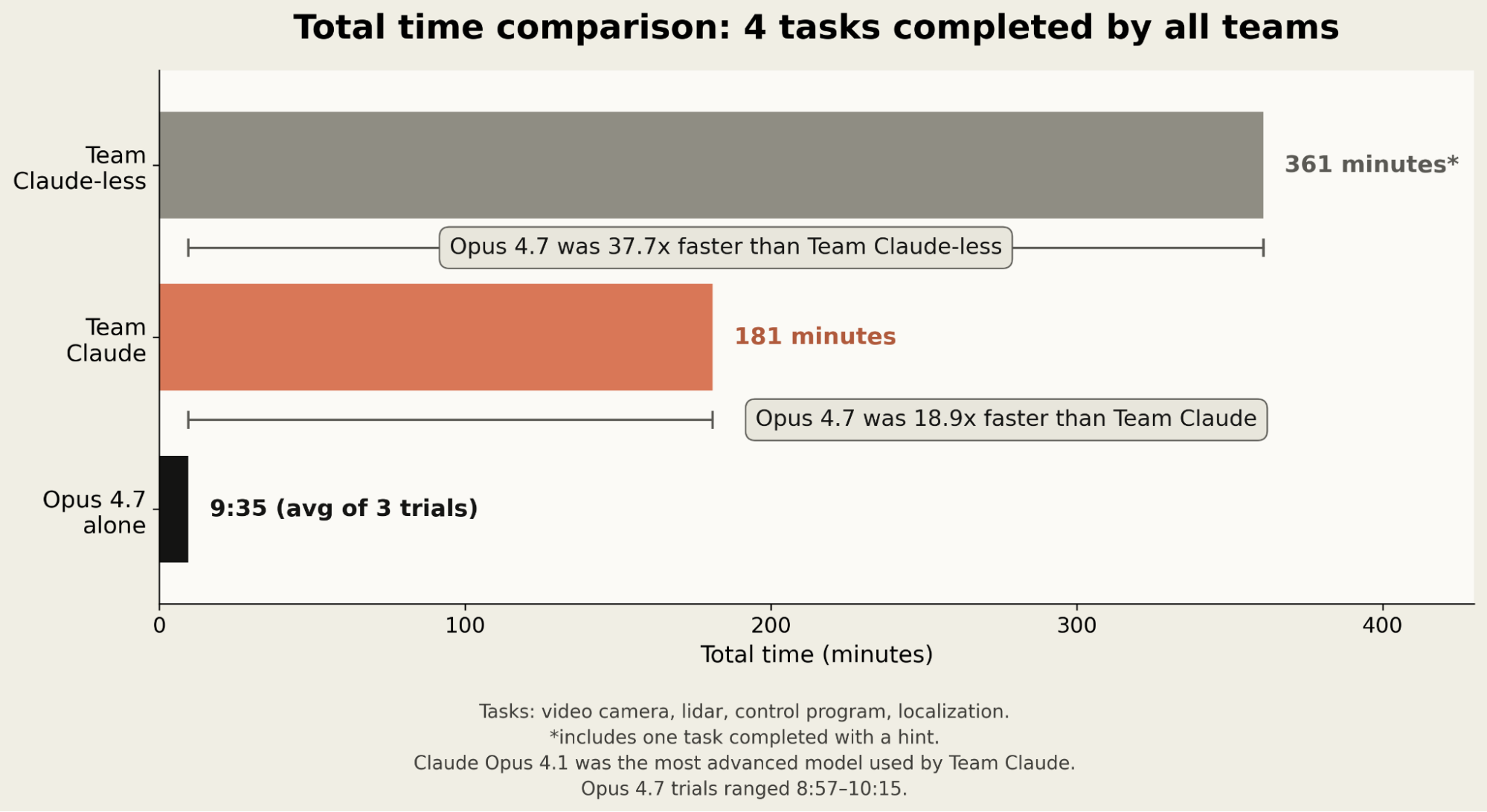
速度对比(4 项全部团队都完成的任务)
| 团队 | 总用时 | 对比 Opus 4.7 |
|---|---|---|
| 无 Claude 团队 | 361 分钟 | 慢 37.7 倍 |
| Claude 辅助团队 | 181 分钟 | 慢 18.9 倍 |
| Claude Opus 4.7(独自) | 9 分 35 秒 | — |
如果看全部 5 项编程任务(排除取球任务),Claude 辅助团队完成了 5 项,用时 264 分钟;而 Opus 4.7 的 3 轮试验平均仅需 12 分 7 秒。无 Claude 团队甚至没能完成全部 5 项任务。
代码效率
| 团队 | 编写的代码行数 |
|---|---|
| Claude 辅助团队 | 10,309 行 |
| 无 Claude 团队 | 1,136 行 |
| Opus 4.7 独自 | 1,045 行 |
Opus 4.7 生成的代码量不到 Claude 辅助团队的十分之一,却在每项任务上同样成功(甚至更成功)。而且大部分代码一次就运行成功——这一点人类团队做不到。
可靠性
Claude 在 3 轮试验中表现出极低的内部差异。传感器连接等核心任务每次都选择了最优路径。唯一的一次异常是在沙滩球检测任务中,有一轮选择了过时的目标检测算法,但最终还是给出了有效方案。
"对于本次实验中处于其能力范围内的工作,Claude 现在已经相当可靠了。"
四、唯一失败的任务:精细物理操控
在"自主取回沙滩球"这个任务上,Claude 失败了。它能将机器人移动到球后面,尝试把球往回推,但动作控制不够精细,最终没能成功。
这个任务需要一种闭环的感知-调整能力——人类经过练习后可以做到轻轻推球,在反复试错中学习。这是目前 AI 在物理世界中的短板。
不过,一位更有经验的研究人员通过额外的支架和调试,最终成功实现了自主取球。这说明当前模型在给定更多支撑的情况下很可能也能做到。
五、更深层的含义
1. 进步来自通用扩展,而非专门研究
Anthropic 团队特别指出,这些改进并非来自针对机器人技术的定向研发。Claude 操控机器狗的能力——就像 LLM 发展史上的许多其他进步一样——是从通用模型扩展中涌现出来的。
"这些进步并非源自对模型机器人能力的集中攻关。它们像 LLM 发展史上的许多其他进步一样,从更通用的扩展中涌现出来。"
2. 人类角色正在转变
从第一阶段到第二阶段,人类在 AI 协作中的角色经历了根本性转变:
| 阶段 | 人类角色 |
|---|---|
| 第一阶段(2025) | 和 AI 结对编程,一起解决问题 |
| 第二阶段(2026) | 插电、输入提示、审批命令、切换任务 |
AI 现在能够独立完成以前需要结对编程的工作,人类得以解放出来从事更高层次的决策和控制。
3. 物理 AI Agent 的早期时代
"我们很可能正在进入物理 AI Agent 的早期时代。"
模型可以相对轻松地使用现成的物理工具完成有限目的——这类似于早期 AI 学会使用字符串替换来自主编码的转折点。
或许最令人深思的是团队的结语:
"模型搭建自己的软件工具在不久之前还显得异想天开,但它现在正在发生。排除硬件领域的同样轨迹,恐怕是不明智的。"
六、如何看待这个结果
Project Fetch 第二阶段传递的信号非常清晰:AI 能力正在从数字世界向物理世界蔓延,而且速度比几乎所有人的预期都要快。
从一年前需要人类全程辅助,到如今人类只需插电和审批——这个跨越只用了不到 12 个月。如果按照同样的速度推进,明年此时我们可能会看到完全自主的物理任务执行。
对于独立开发者和技术从业者来说,这既是警示也是机遇。如果 AI 能够以 37.7 倍的速度完成物理世界的任务,它在代码世界的能力只会更强。2026 年,与 AI 协作已经不是竞争优势——不与 AI 协作才是竞争劣势。
这场变革才刚刚开始。
© 2026 四月 · CC BY-NC-SA 4.0
原文链接:https://www.aprilzz.com/ai/project-fetch-phase-two
相关文章
Claude Fable 5 和 Mythos 5 发布:Anthropic 迄今最强模型,以安全护栏释放前沿能力
2026 年 6 月 9 日,Anthropic 发布 Claude Fable 5(面向公众的 Mythos 级模型)和 Claude Mythos 5(增强版)。新模型在几乎所有 AI 能力基准上实现 SOTA,定价仅为 Mythos Preview 的一半。
Claude Opus 4.8 正式发布:Anthropic 迄今最强模型,Agent 能力大幅提升
2026 年 5 月 28 日,Anthropic 发布 Claude Opus 4.8。新模型在编程、Agent、推理等全面超越前代,推出 Effort Control 和动态工作流功能,定价不变。
NVIDIA 开源物理 AI Agent 工具集:机器人、自动驾驶、工业数字孪生的新范式
NVIDIA 在 GTC Taipei 2026 上宣布开源其物理 AI Agent 工具和技能库,覆盖 Omniverse、Cosmos、Isaac、Metropolis 全线产品,让 AI Agent 可以直接操作机器人、自动驾驶和工业数字孪生系统,已有多个企业实战案例验证。